Boston Dynamics and Toyota Research Institute Demonstrate AI-Powered Atlas Humanoid Using Large Behavior Model
The collaboration showcases Atlas performing complex, long-horizon tasks with seamless whole-body control, enabling rapid skill acquisition and adaptive behaviors without additional programming.
Image Courtesy: Public Domain
Boston Dynamics and Toyota Research Institute (TRI) announced a big step forward in robotics and artificial intelligence research: demonstrating a Large Behavior Model (LBM) powering the Atlas humanoid robot. In a video jointly released today by the two organizations, Atlas performs a long, continuous sequence of complex tasks that require combining object manipulation with locomotion. By adopting LBMs, new capabilities that previously would have been laboriously hand-programmed can now be added quickly and without writing a single new line of code.
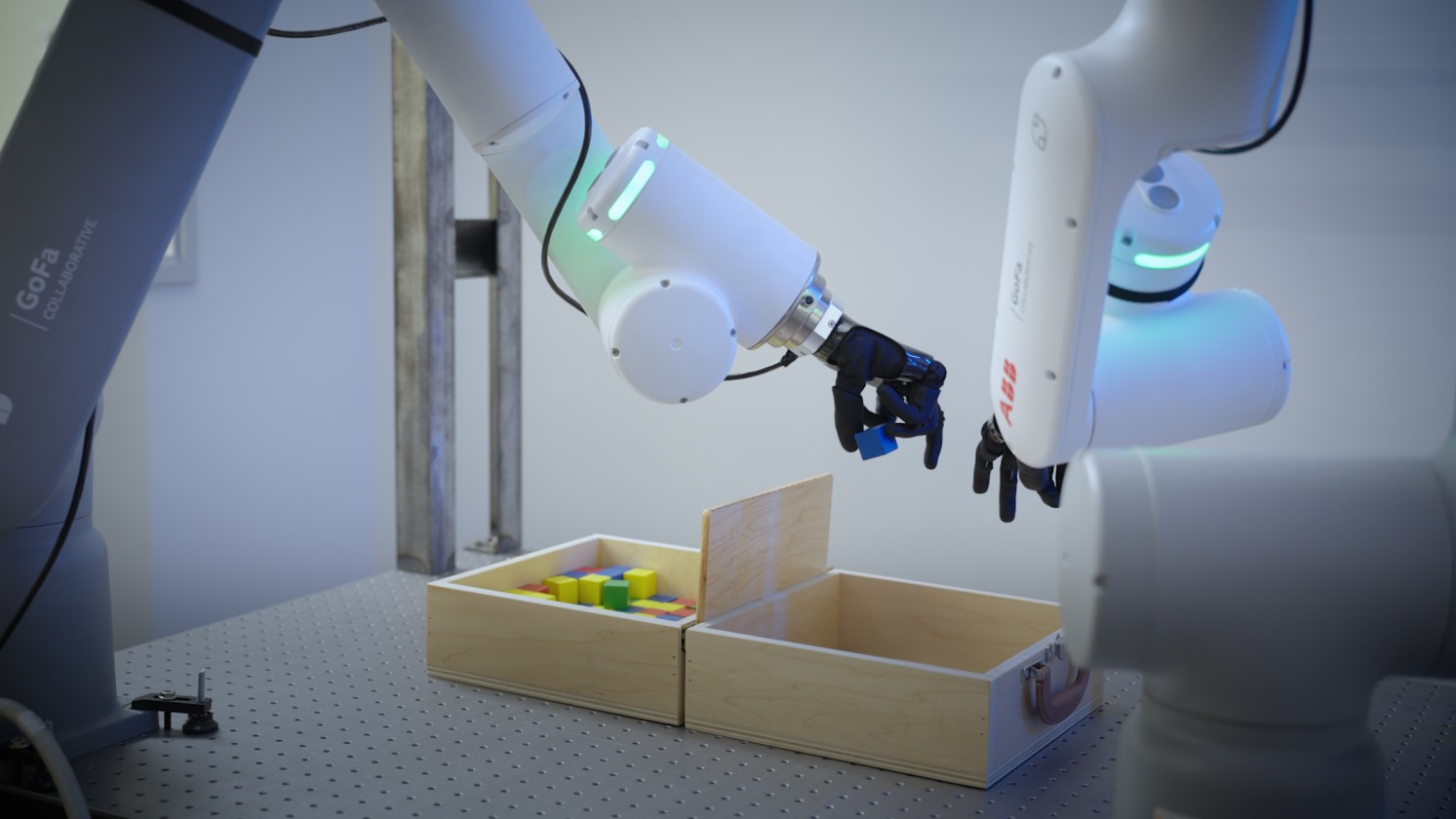
The video shows the humanoid using whole-body movements, such as walking, crouching, and lifting, to accomplish a series of packing, sorting, and organizing tasks. Throughout the sequences, researchers interject unexpected physical challenges mid-task, such as closing the lid of a box and sliding it across the floor, requiring Atlas to self-adjust in response. Humanoids that have demonstrated this capability before typically separate the low-level walking and balancing control from the control of the arms for manipulation; in this project, a single Large Behavior Model has direct control of the entire robot, treating the hands and the feet almost identically.
This breakthrough is the result of the October 2024 joint research partnership between Boston Dynamics and TRI, which was designed to leverage their combined strengths and expertise to accelerate the development of smart robots. The result reaffirms the incredible potential of AI technologies in developing general-purpose humanoid assistants.
"This work provides a glimpse into how we're thinking about building general-purpose robots that will transform how we live and work," said Scott Kuindersma, vice president of Robotics Research at Boston Dynamics. "Training a single neural network to perform many long-horizon manipulation tasks will lead to better generalization, and highly capable robots like Atlas present the fewest barriers to data collection for tasks requiring whole-body precision, dexterity, and strength."
"One of the main value propositions of humanoids is that they can achieve a huge variety of tasks directly in existing environments, but the previous approaches to programming these tasks simply could not scale to meet this challenge," said Russ Tedrake, senior vice president of Large Behavior Models at Toyota Research Institute. "Large Behavior Models address this opportunity in a fundamentally new way – skills are added quickly via demonstrations from humans, and as the LBMs get stronger, they require less and less demonstrations to achieve more and more robust behaviors."
The project, co-led by Scott Kuindersma and Russ Tedrake, is conducting research to answer fundamental questions about humanoid robots and Large Behavior Models, advancing the field's understanding of large models for whole-body control, including advanced manipulation and dynamic behaviors.