Inbolt’s Albane Dersy on Redefining Bin Picking With Human-Like On-Arm Robot Vision
30 December 2025 | Interaction | By editor@rbnpress.com
The Inbolt cofounder and COO explains why traditional bin-picking systems are failing modern factories—and how real-time, AI-driven on-arm vision is enabling robots to adapt to unstructured environments like human operators.
As manufacturers push automation into increasingly variable and unstructured environments, traditional bin-picking systems are struggling to keep up. In this interview with Robotics Business News, Albane Dersy, cofounder and COO of Inbolt, outlines why fixed camera vision and pre-defined grasps no longer meet modern production demands—and how Inbolt’s AI-powered, on-arm 3D vision is enabling robots to see, adapt, and pick parts with a level of flexibility closer to human behavior.
1. What key limitations in traditional bin-picking systems does Inbolt’s next-generation solution address, and why was this innovation necessary now?
Traditional bin-picking systems were designed for environments that are far more controlled than today’s factories. Most rely on fixed overhead 3D cameras, rigid calibration procedures, and precomputed grasp points. These assumptions break down quickly when bins move, parts overlap, lighting changes, or product variants are introduced.
In practice, this leads to several well-known limitations. First, fixed-camera systems require precise bin positioning and mechanical fixtures. Any deviation, whether caused by vibrations, forklift handling, or manual replenishment, can degrade detection accuracy and force downtime. Second, many legacy systems depend on identifying a “perfect” grasp point before the robot moves. If that point is obstructed or unreachable, the system fails rather than adapting. Third, integration costs are high: multiple cameras per cell, long-range optics, calibration rigs, and frequent re-teaching when parts change all increase total cost of ownership.
The need for a new approach has become more urgent as manufacturers face rising labor shortages, higher product mix, and pressure to shorten automation ROI. Many bin-picking tasks that were once handled manually, because they were too variable or unpredictable, are now expected to be automated. However, traditional vision systems were not built for fully unstructured environments where parts may be stacked, tilted, reflective, or partially hidden.
Inbolt’s next-generation bin-picking solution was developed specifically to address these gaps. Instead of treating variability as an exception, it assumes that variability is the norm. By mounting the 3D vision system directly on the robot arm and closing the perception-action loop in real time, the robot can continuously adapt its understanding of the scene as it moves. This removes the dependency on fixed infrastructure and pre-defined grasps, enabling reliable operation in conditions that previously required manual handling.
2. Can you describe how Inbolt’s AI-powered on-arm vision works and how it enables robots to adapt like a human when identifying and grasping parts?
Inbolt’s bin-picking system is built around a simple but fundamental principle: robots should see the world from where they act. By placing the 3D camera directly on the robot arm, perception is no longer static—it moves with the robot and updates continuously.
The AI workflow begins with real-time 3D perception. The on-arm camera captures depth data of the bin and its contents, even when parts are randomly oriented or partially occluded. Inbolt’s AI models, trained directly on CAD data rather than large annotated image datasets, identify the parts and estimate their 3D pose in milliseconds.
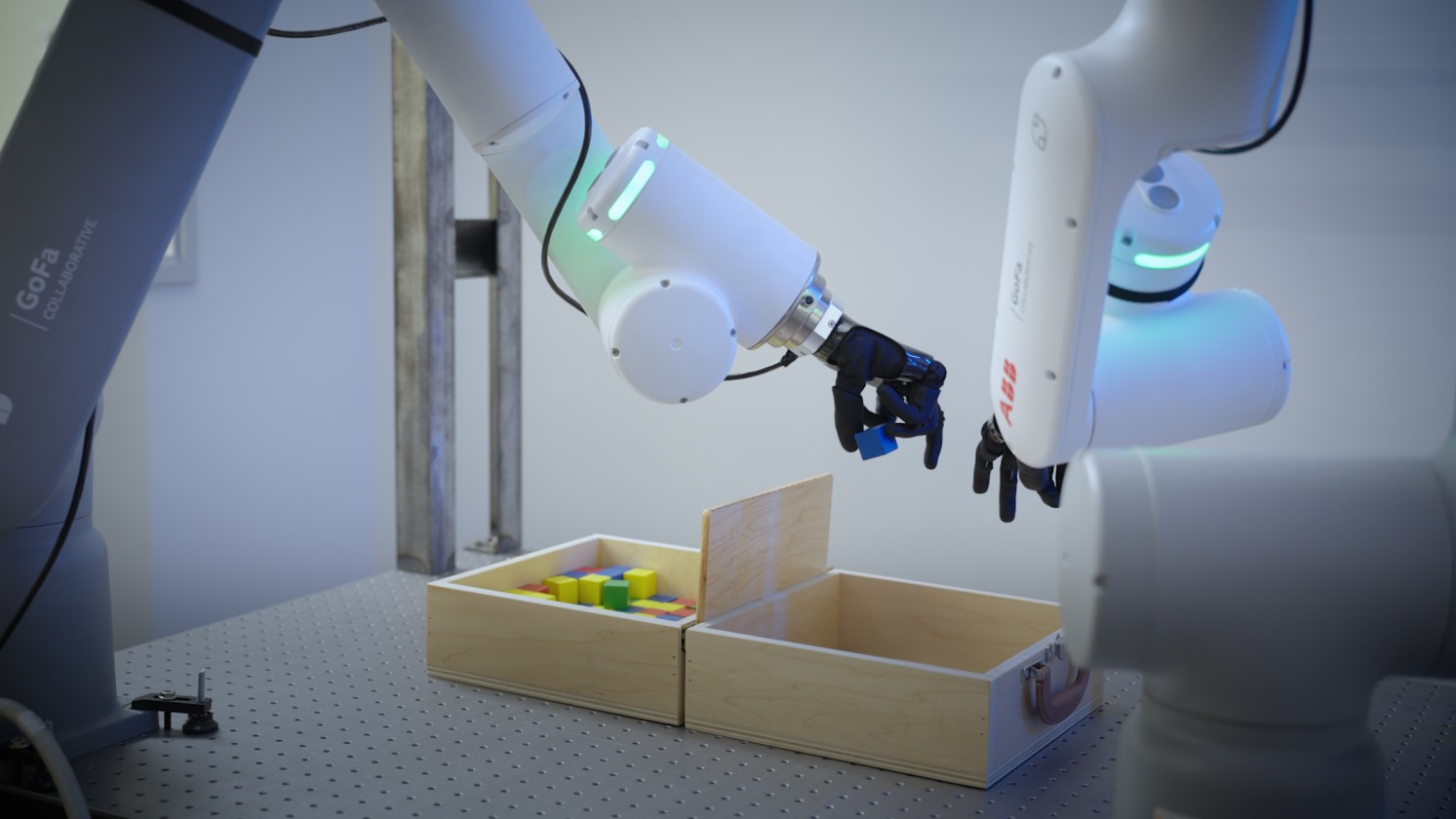
What differentiates the system is how it handles grasping. Rather than computing a single optimal grasp, the AI identifies multiple viable grasp candidates in real time. This mirrors human behavior: when a person reaches into a bin, they do not search for a perfect grip, they choose any stable surface that is accessible. If the first attempt fails, they naturally adjust.
Once the robot grips a part, Inbolt’s system performs what we call in-hand localization. During the robot’s motion, the camera continues to observe the part and refine its estimated position. If the part shifts slightly in the gripper, the robot trajectory is corrected on the fly to ensure accurate placement. This closed-loop control is a major departure from traditional open-loop bin picking, where perception ends before motion begins.
The result is a robot that behaves less like a pre-programmed machine and more like a human operator, continuously perceiving, adjusting, and compensating for uncertainty throughout the task.
3. What specific technical challenges did your team face when developing real-time adaptability for industrial robots in unstructured environments?
Achieving real-time adaptability in industrial settings presents several technical challenges, particularly when reliability and latency constraints are strict.
One major challenge was latency. For a robot to adapt during motion, perception, decision-making, and control must happen within tens of milliseconds. Inbolt’s system operates with detection times around 100 ms and overall pick cycles under one second, which required careful optimization of AI models.
Another challenge was robustness to visual complexity. Industrial parts are often metallic, reflective, or visually similar to one another. Lighting conditions vary widely across factories, and bins may be deep, narrow, or partially shadowed. The AI models had to perform reliably without controlled lighting or artificial markers.
Finally, there was the challenge of integrating perception tightly with robot control. Traditional vision systems provide static pose estimates, leaving motion planning entirely to the robot controller. Inbolt had to build a system capable of continuously updating robot trajectories at high frequencies, while remaining compatible with multiple robot brands and controllers. Overcoming these challenges required a combination of efficient 3D vision, CAD-based AI training, and deep integration with industrial robot control loops.
4. How does mounting the 3D vision camera directly on the robot arm improve performance compared to traditional fixed camera setups?
Mounting the camera on the robot arm fundamentally changes the geometry of perception. In fixed-camera systems, visibility is limited by occlusions, distance, and field of view. Parts deep inside a bin may be partially hidden, and the camera cannot change its perspective to resolve ambiguity.
With an on-arm camera, the robot actively controls its viewpoint. It can move closer to the bin, adjust angles, and capture multiple perspectives before and during the pick. This dramatically improves detection reliability, especially for overlapping or stacked parts.
From an integration standpoint, the benefits are equally significant. A single camera can serve multiple bins or stations, reducing hardware costs. There is no need for overhead mounting structures, long-range optics, or repeated calibration when bin positions change. This is particularly valuable in flexible production environments or when bins are delivered by autonomous mobile robots (AMRs), where precise positioning cannot be guaranteed. In short, robot-mounted vision aligns perception with action, improving robustness while simplifying deployment.
5. What measurable benefits—such as pick success rate or cycle time—have customers seen when deploying this solution in live production settings?
In live production environments, Inbolt’s bin-picking solution has consistently delivered strong, measurable results. Across multiple factories, customers have achieved pick success rates of up to 95% in both semi-structured and fully unstructured bins. Average pick cycle times are typically below one second, enabling throughput levels compatible with high-volume automotive production. One great example comes from Stellantis’ plant in Caen, France, where Inbolt’s system was deployed for shaft handling. Beyond raw performance metrics, customers also report higher uptime and reduced maintenance. Because the system adapts to variability rather than requiring constant reconfiguration, it remains stable even as parts, bins, or lighting conditions shift.
6. Which industries or types of manufacturing environments are you seeing the strongest demand for this human-like bin-picking capability?
The strongest demand today comes from industries where part variability is high and manual handling has historically been difficult to automate. Automotive manufacturing is a leading example. Powertrain components, brackets, shafts, and cast parts are often stored in bulk bins with little consistency in orientation. Inbolt’s bin-picking solution is already deployed across multiple automotive plants in Europe and North America. Home appliance manufacturing is another key area, particularly for handling painted or machined parts that vary slightly between product lines. More broadly, any industry facing high product mix, shorter production runs, and labor constraints stands to benefit from adaptable bin picking.
7. How does Inbolt’s system integrate with existing robotic platforms and what degree of customization or training is required for different parts and workflows?
Integration was designed to be as lightweight as possible. Inbolt’s system is compatible with major robot brands including FANUC, ABB, KUKA, Yaskawa, and Universal Robots. It connects via standard industrial communication protocols and runs on an industrial-grade controller powered by NVIDIA hardware.
Training a new part typically requires only the CAD model. Using Inbolt Studio, users can set up and train a new application in under 10 minutes, without internet connectivity and without collecting large datasets. The same system can manage up to 70 different part models on a single controller, enabling rapid changeovers and mixed production. Customization is therefore focused on the workflow rather than the vision system itself. This significantly reduces engineering effort and accelerates deployment across multiple stations or sites.
8. Looking ahead, what future enhancements do you foresee for AI-guided robotics and bin-picking automation over the next several years?
Looking forward, we see bin picking as just one step toward more general-purpose, autonomous robotics. Future enhancements will likely include deeper integration between perception and manipulation, enabling robots to reason not just about where a part is, but how it should be handled based on downstream processes. We also expect greater use of generalist AI models that can transfer learning across tasks, reducing setup time even further. Finally, as edge computing continues to advance, more sophisticated real-time reasoning will become possible directly on the robot. This will push automation beyond repetitive tasks toward systems that can truly adapt to changing conditions, bringing industrial robotics closer to the flexibility of human labor, but with the reliability and scalability required for production.